Perspective
MODOOL - Training device for surgeons | Designsprint 21
Surgeons have to train a lot before they can treat live patients. Simulators for laparoscopy or other minimally invasive procedures are expensive. The high price and limited variety of procedures that can be performed on many systems were particularly noticeable during market research. This severely limits the time available for practicing procedures independently in a low-risk environment. A less expensive and more versatile system would allow doctors to become more familiar with important basics or unfamiliar procedures in an interactive way.
MODOOL - Training device for surgeons
MODOOL is a training device for prospective and experienced surgeons. In a medical design sprint project in 2023, design student Marius Kühn created the concept for MODOOL. It is primarily used to depict minimally invasive procedures such as laparoscopies or arthroscopies. The modular structure is intended to allow a wide variety of scenarios to be depicted using the simplest and most cost-effective means possible.
The personal goal for the design was to create a product that was as realistic and universally applicable as possible. In order to examine the technical implementation as closely as possible, a functional prototype was developed that would reflect all the essential functions for operating such a simulator. In addition to providing important insights into the use of the selected sensors, the prototype also serves as proof that an uncomplicated, cost-effective implementation of the technical package is entirely realistic. With the help of an Arduino microcontroller and a handful of simple sensors, a fairly accurate digital image of the tool can be generated in the 3D engine.
The concept was then refined on the basis of the prototype and a design was developed as a vision for a market-ready product.
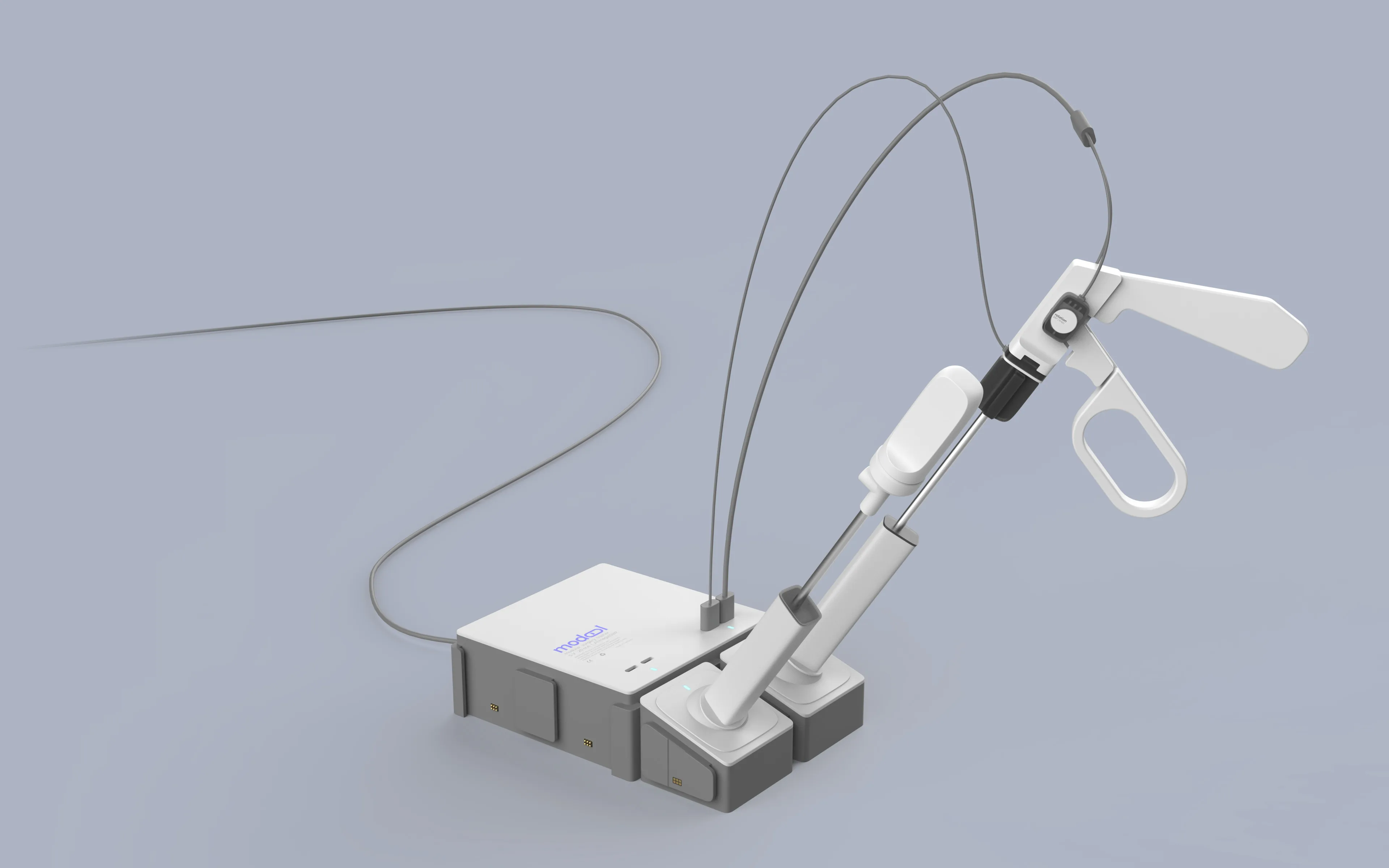
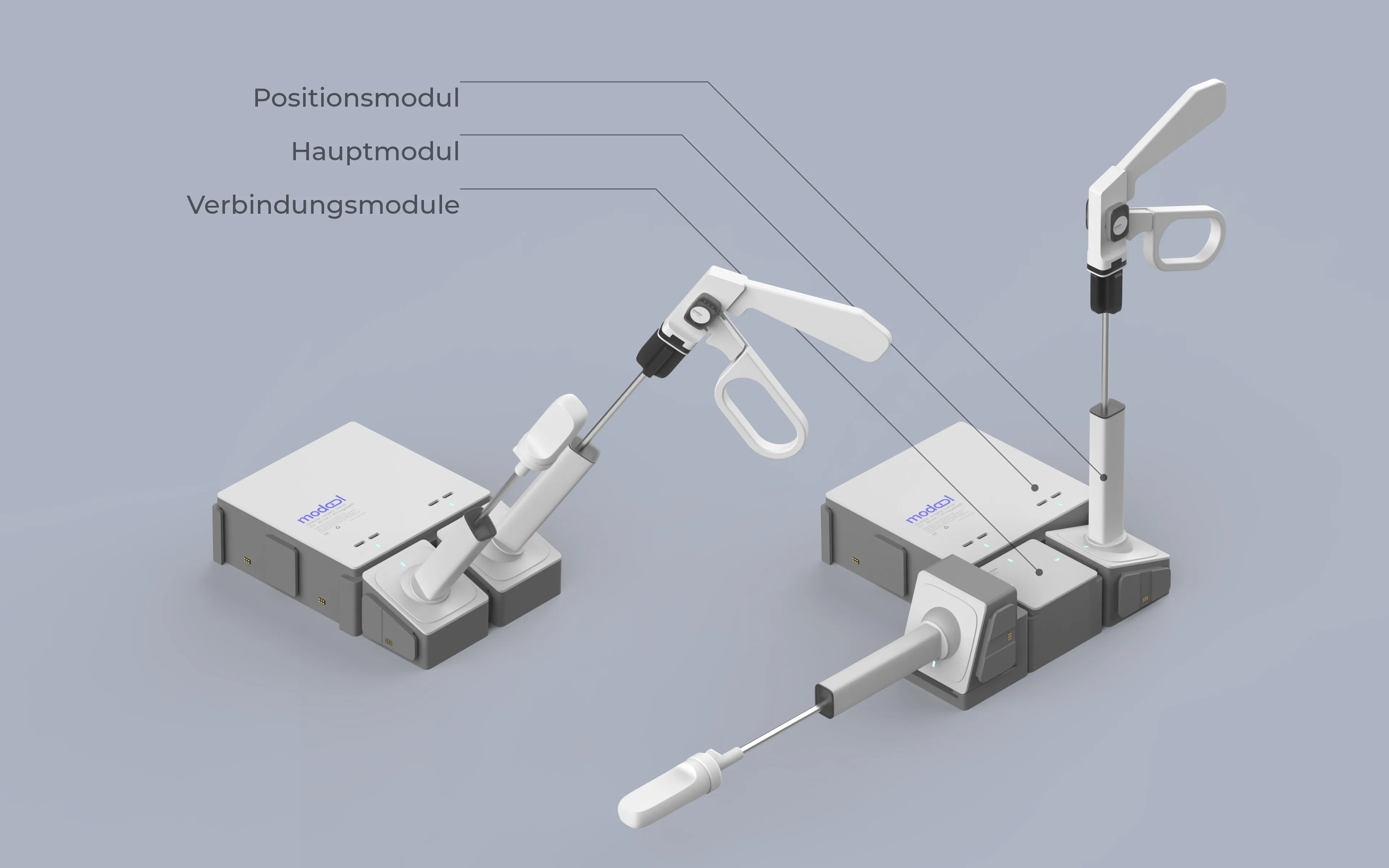
The heart of the simulator is the main module. Like the Arduino in the prototype, the signals from the sensors are read out here as digital values and passed on to the computer via a USB connection.
Two types of modules were derived from the required sensors: The basic positioning module records the position of the entire tool relative to the virtual patient. Both the angle of the tool and the penetration depth are recorded. These modules can be anchored to the main unit directly or via various connectors in different positions and orientations. The signals are transmitted via contacts without additional cables or connectors.
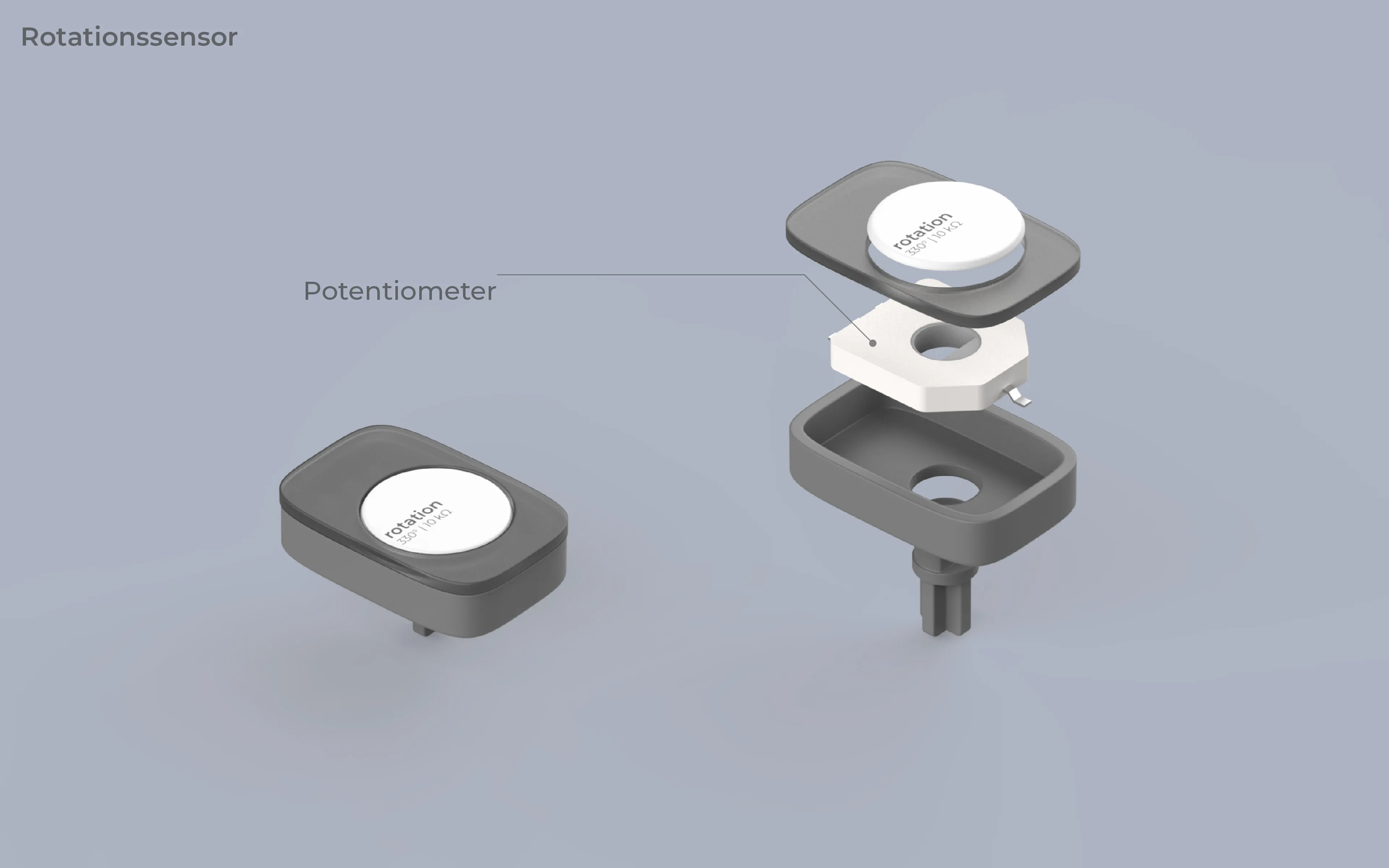
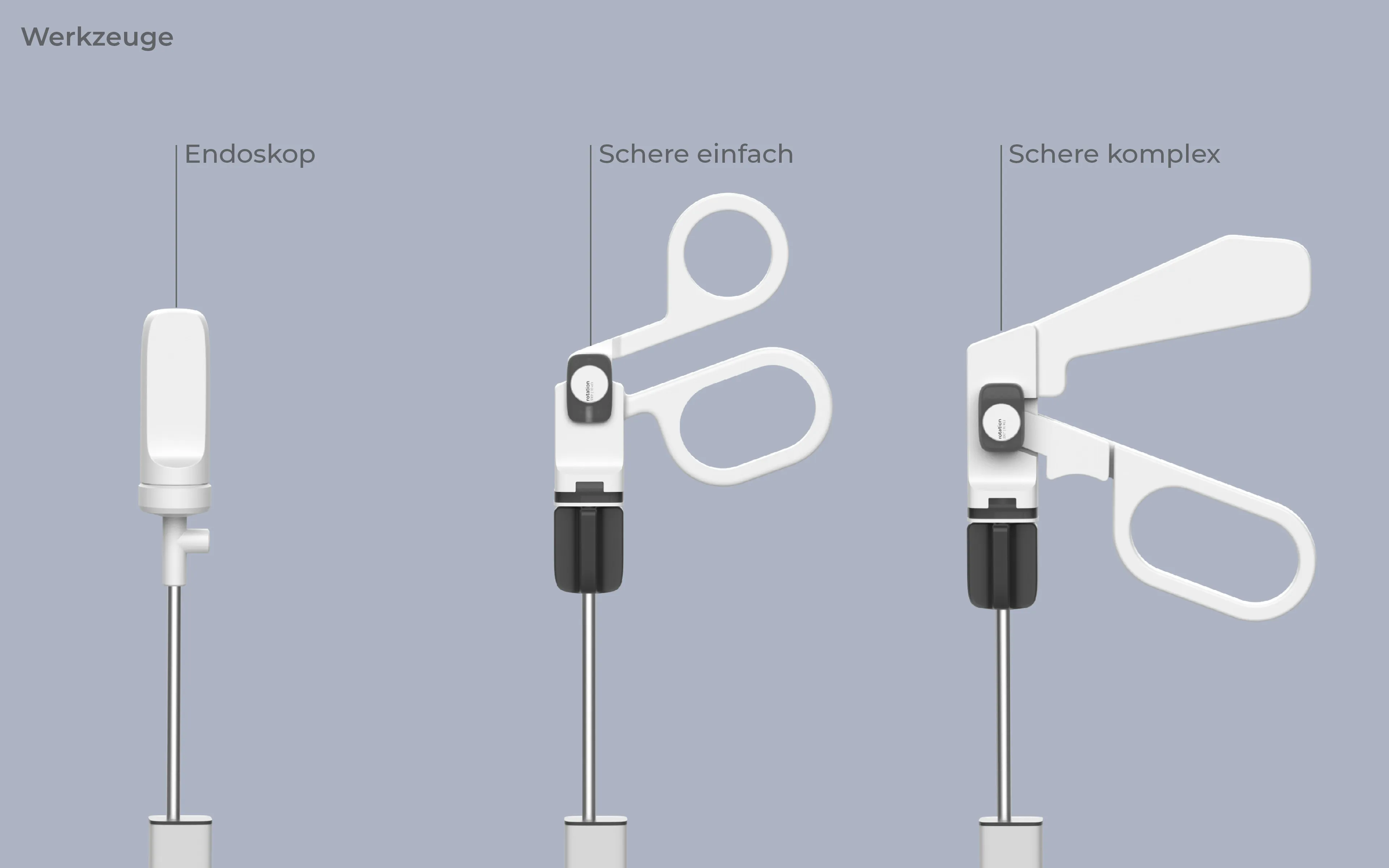
The second, smaller type of modules are simple rotation sensors that are attached directly to the tool handles. They can be used to detect movements such as the opening and closing of scissors and pliers.
Based on these modules, the handles of three instruments were finally implemented as examples: an endoscope, simple surgical scissors or forceps and more complex forceps with an additional degree of articulation.
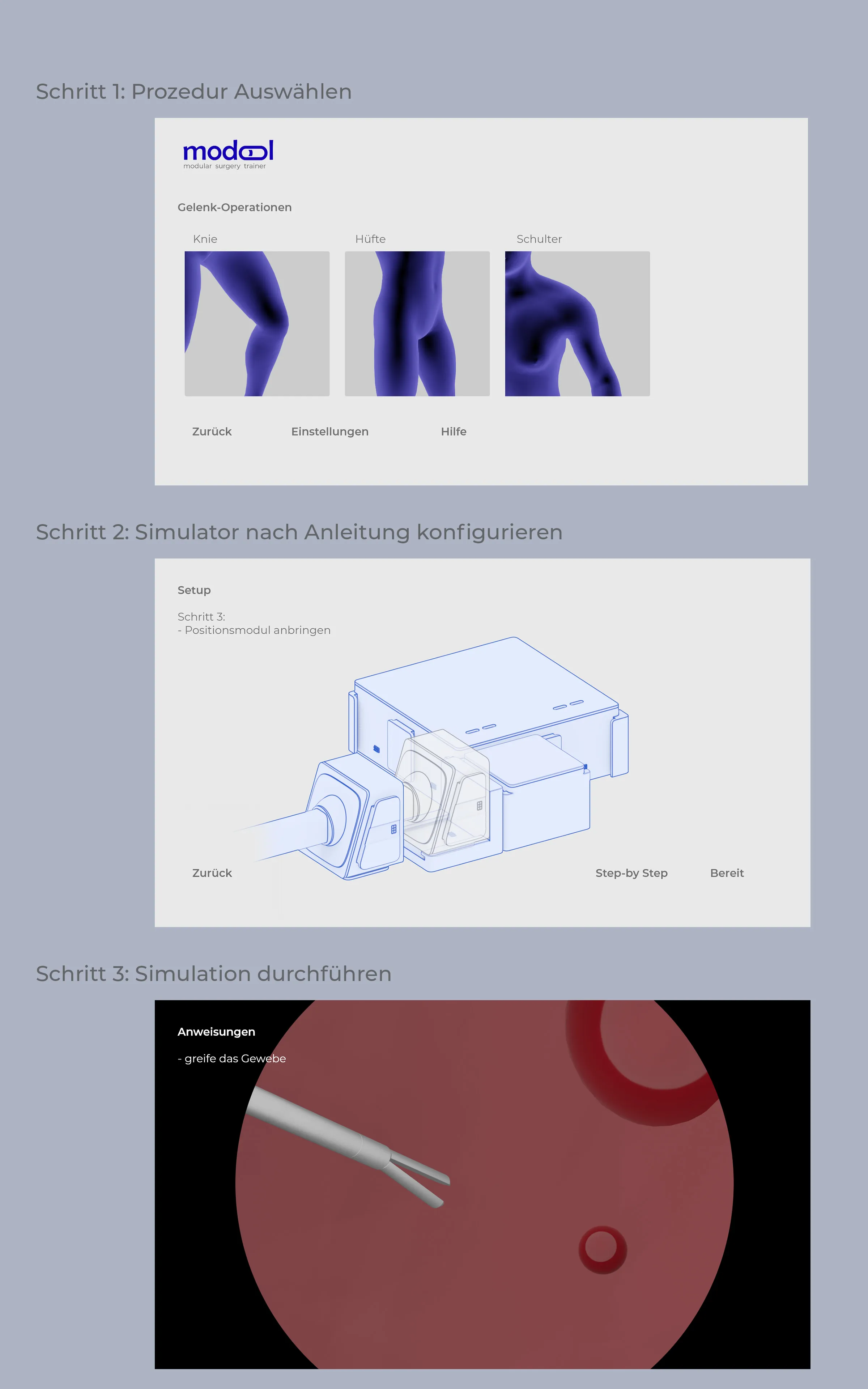
As a final step, a rough draft of the interface was used to illustrate the exact process of configuring the modules: first, the process to be simulated must be selected from the menu. Users then receive quick, illustrated step-by-step instructions on how to configure the modules in order to reproduce the scenario as realistically as possible. Once this has been done, the simulation can be started and the procedure can be practiced virtually.
Thank you for your medical design sprint, Marius.
Frequently asked questions





