Surgical Robot Startup
The future of surgery: robotics and industrial design

This is part 1 of our two-part series about working with an ambitious start-up in the world of robotic surgery. This first part is about the hardware development including industrial design.
In modern surgery, advanced technologies are often unevenly distributed. Our latest project, a state-of-the-art robotic surgery system, addressed this problem. With a focus on ergonomics, precision and cost-efficiency, it pursued an accessible alternative to established, more expensive systems. More than two years of intensive development work - our largest and most complex project to date - were characterized by interdisciplinary collaboration with specialists and partners. The aim was to create a user-friendly and safe system that would benefit surgeons and patients worldwide. But things turned out differently...
Task
- Development of a robot-assisted workstation for minimally invasive surgery
- Focus: cost-efficient and user-friendly design
- Usability optimization and validation to ensure that the system is approved as a medical device in accordance with regulations
- Responsibilities of WILDDESIGN
- Design, engineering and prototyping
- Design and engineering support for the development department
- Planning and implementation of user tests
Procedure
- Creating a design vision based on the technical package of the functional prototype
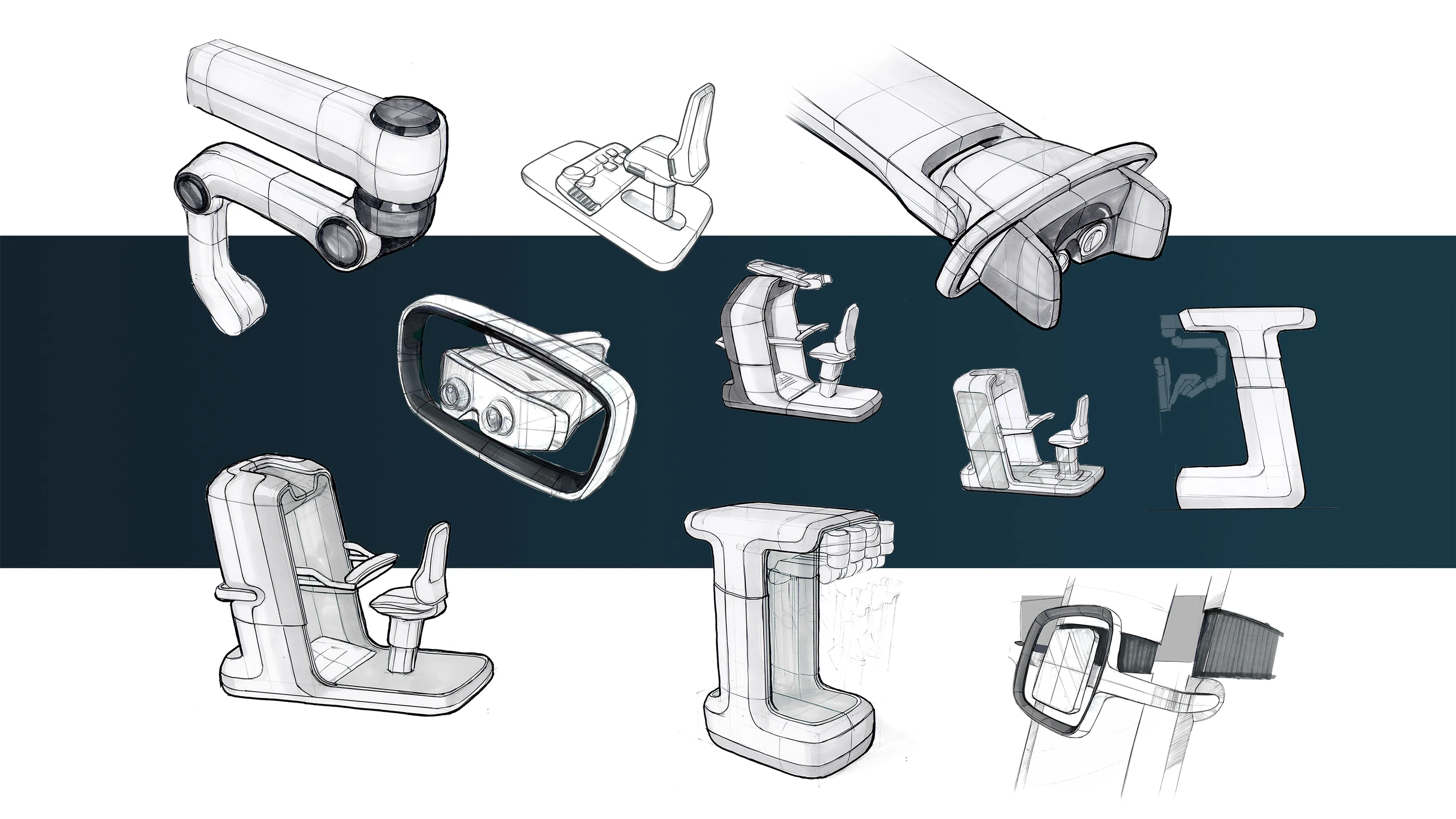
- Development of a design language that can be applied to the entire system
- Development of form and function: starting with sketches, detailing in CAD, validation through quick mock-ups and complex functional prototypes
- Close cooperation with the client, weekly meetings
Result
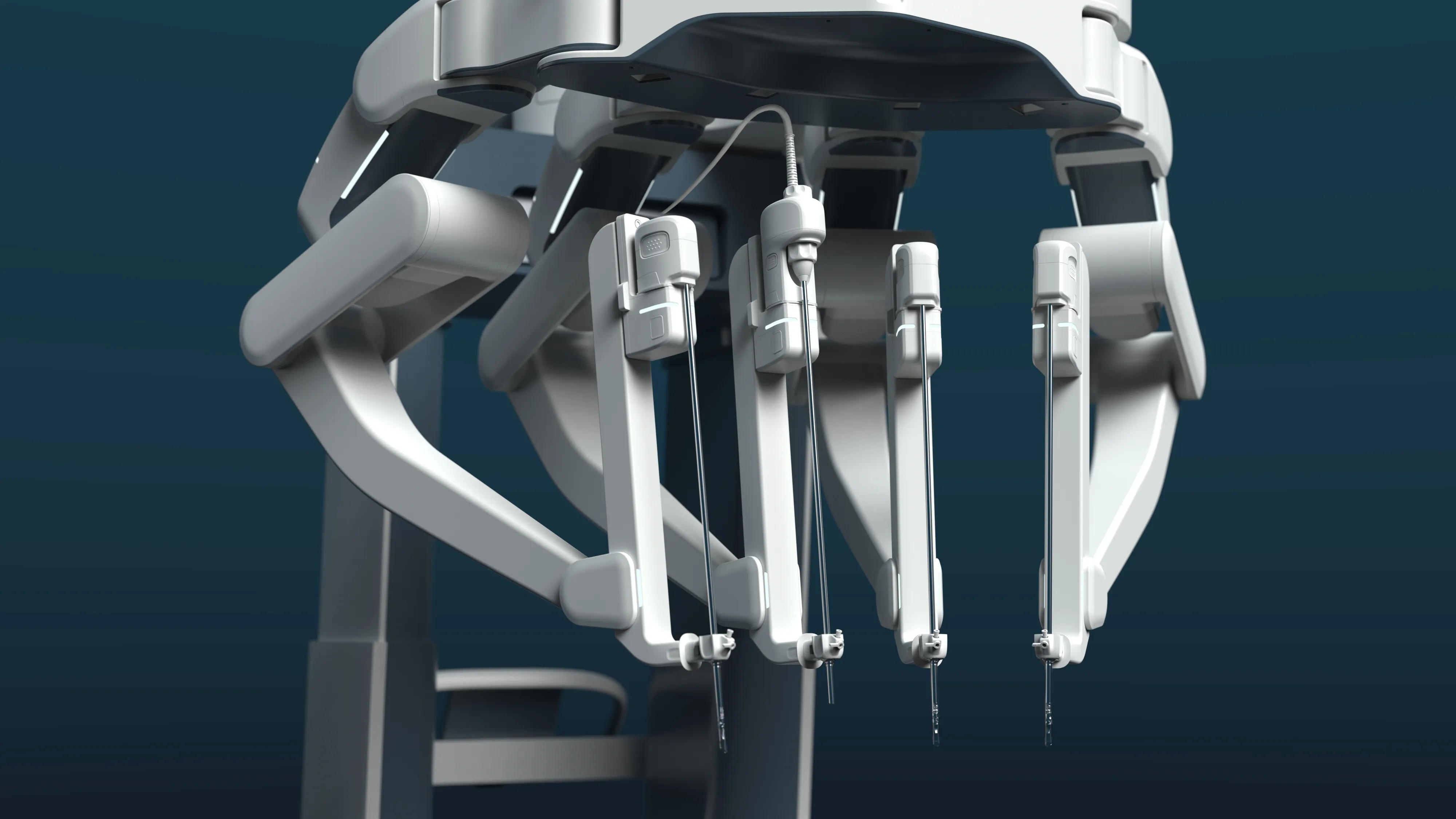
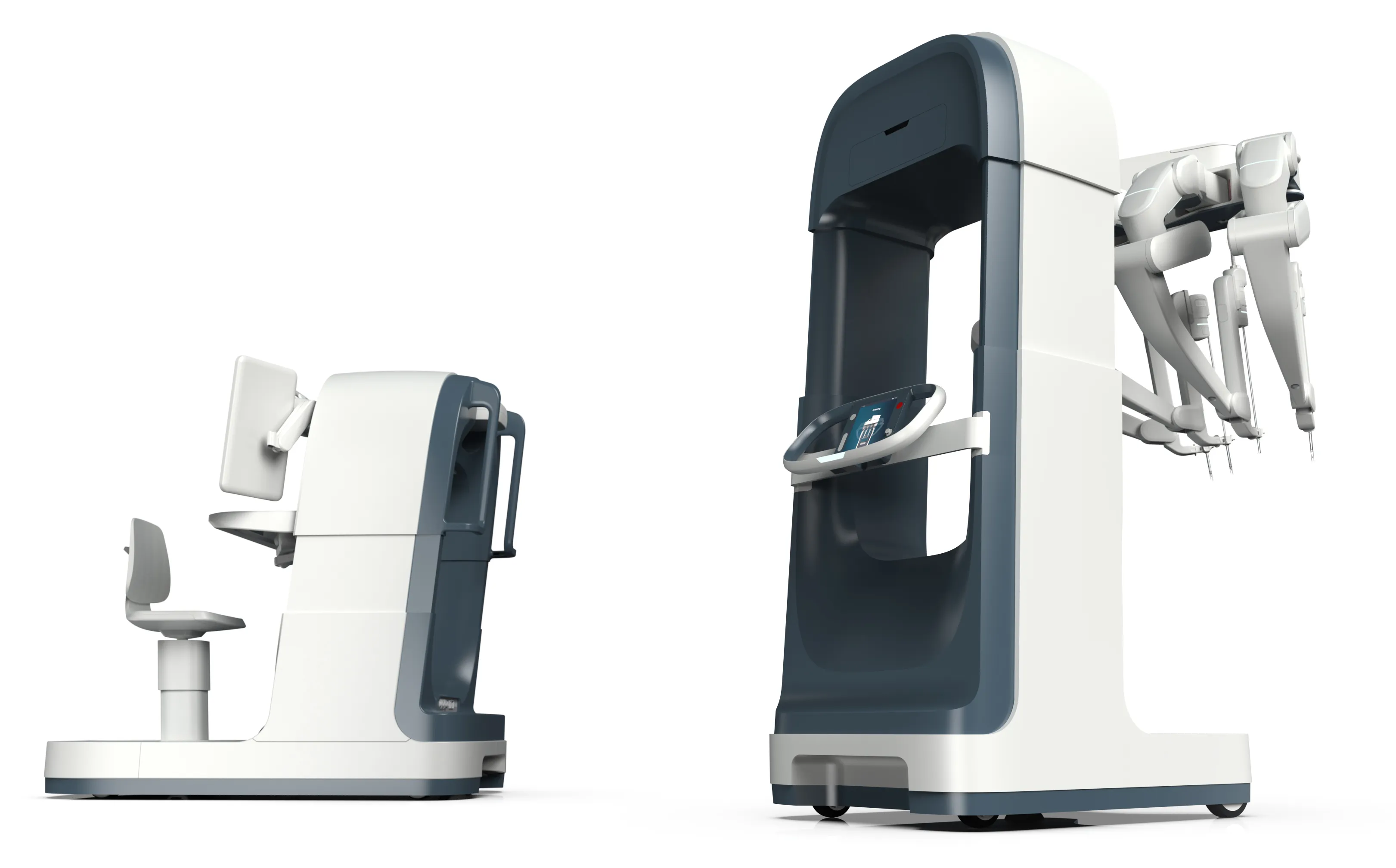
- Three-part complete system consisting of control unit, robotic unit and device tower
- Specialized robotic arms: laparoscopic instruments and endoscopes, designed to be highly mobile and space-saving
- Ergonomic working, a better overview in the OR and faster preparation and post-processing
- Confidence-inspiring and precision design that stands out from the competition
Precise, ergonomic and accessible
In close cooperation with our customer and a number of specialized partners, we developed assemblies, interfaces and designed interfaces for a modern robot-assisted surgical system over a period of more than two years. It had to be ergonomic, cost-efficient and accessible for different environments and healthcare systems. A central component was the cost-effective telemanipulator, which was to enable minimally invasive procedures with high precision. Numerous tests and iterations ensured that the system could meet the highest clinical requirements while being easy to use.
Tailor-made user experience: customizable and intuitive
The system was designed to optimize working conditions in the operating theatre. Surgeons could flexibly adapt the interface to their individual requirements. Functions and screen layouts could be saved to ensure efficient use. The precise display of information and intuitive menus facilitated collaboration in the OR and enabled smooth communication between surgeon and OR team.

Ergonomics for long operations
The control unit was specifically developed so that surgeons can work without fatigue even during long procedures. Regular tests and feedback loops with ergonomic models showed that the working conditions could be noticeably improved from iteration to iteration. This should contribute to increased concentration and precision, which should further increase safety during operations.
Democratization of surgery: overcoming financial hurdles
The system was designed to break down financial barriers and enable high-quality surgical care even in less resourced healthcare systems. By using low-cost materials and efficient production, we were able to present a solution that would be accessible to many clinics. This democratization of minimally invasive surgery could open up new avenues for broader patient care.
Safety and efficiency in the operating theater
Safety in everyday surgery was a key objective of the development process. From simple ergonomic models to complex prototypes, the system was extensively tested in collaboration with medical professionals. This resulted in a solution that is characterized by precision and efficiency in everyday clinical practice.

Design dynamics: an integrated system
The Robotic Surgery System has become a seamlessly integrated ecosystem. All components - from the control unit to the surgical tools - were optimally coordinated with each other. This integration not only ensured efficient workflows, but also a user-friendly and safe environment in the OR.

Design evolution: progress through user feedback
Through regular feedback loops with surgeons and surgical teams, the system has been continuously developed. Each iteration resulted in tangible improvements, allowing innovative technologies to be seamlessly integrated and user-friendliness to be optimized. Although the project was not completed, we were able to develop a system that represents a clear step forward in terms of precision, cost efficiency and flexibility and stands out from existing solutions in key respects.

WILDDESIGN Part
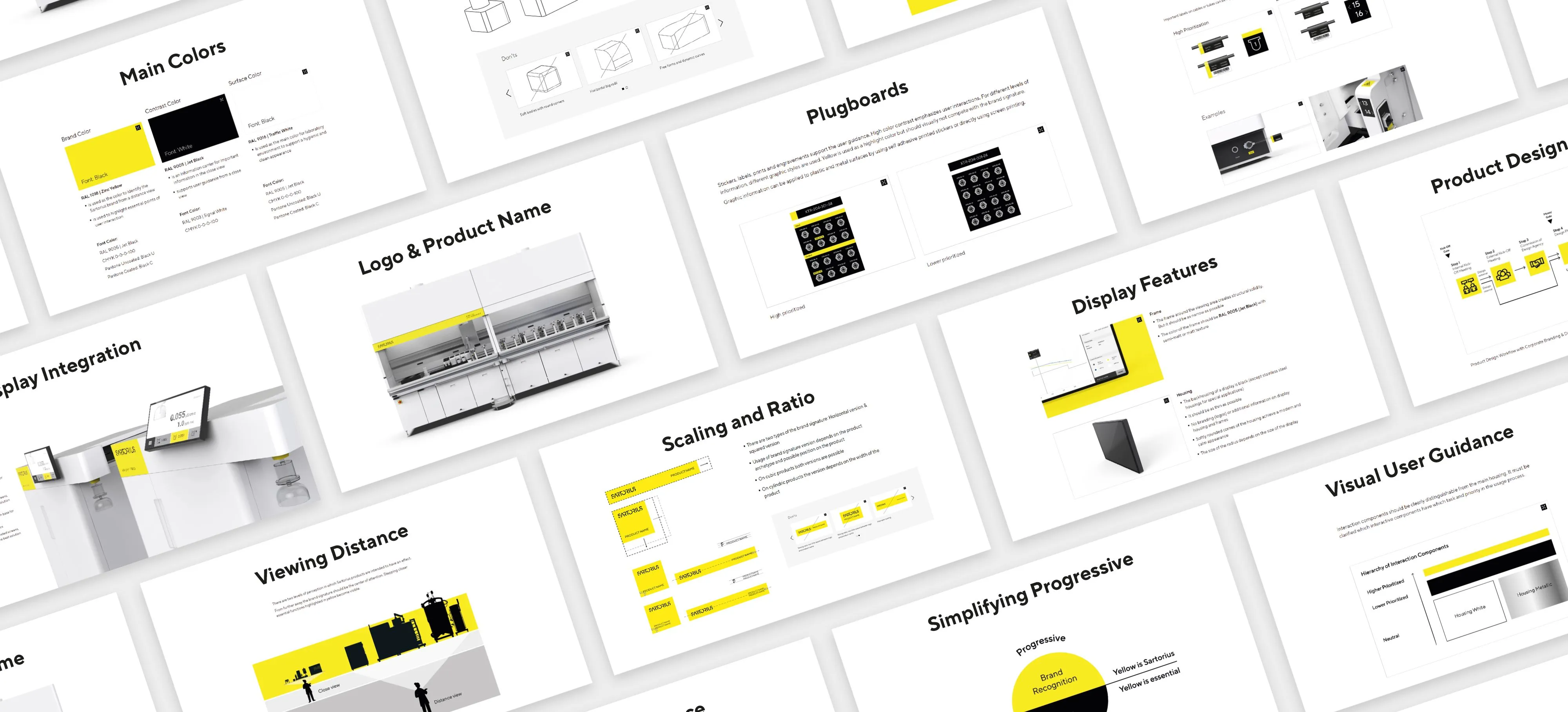
Design vision
- Product and design concept
- System-wide design language and CMF (Color, Material, Finish)
- Design analysis (market, trend, system analysis)
- Conception and design of physical and digital user interfaces
- Preparation, implementation and documentation of usability tests

"Even though the project was not taken through to final implementation, the agile development process was a great experience for us. From definition to design and build to testing, we were able to gain valuable insights. Our ability to develop prototypes quickly and use virtual simulations allowed us to draw important conclusions and make adjustments at an early stage. This flexibility and iterative approach showed us how crucial it is to react quickly to new findings. The project has sustainably strengthened our expertise in the field of robotic surgery."
Next gen Medical design









.webp)